



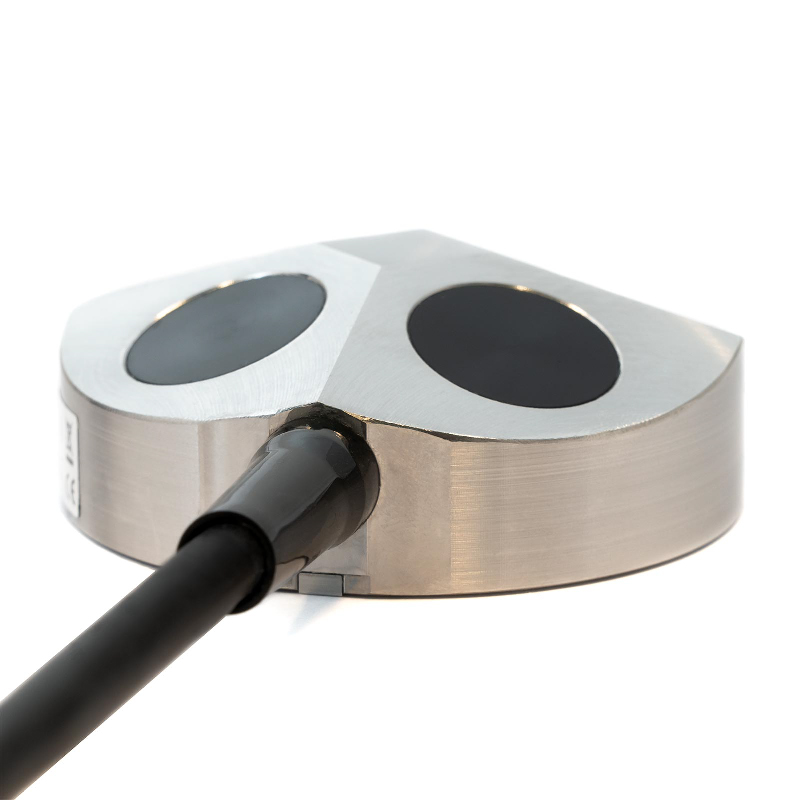













The DVL-A50 is – by far – the world’s smallest commercially available Doppler Velocity Log.
The record breaking 5 cm min altitude makes the A50 extremely useful for working with tools close to the seabed.
With its unbeatable price/performance, the DVL-A50 is now establishing a new market standard.
Key Specifications:
Finally a DVL suitable for small ROVs/AUVs!
The DVL is designed with small ROVs/AUVs in mind where it can be mounted without adding significant weight or drag to the vehicle.
While the A50 is the perfect fit for small vehicles looking for professional navigation features, the combination of low cost and high performance is also making it very attractive for much larger vehicles.
Advantages by using DVL on your vehicle
- Accurate position hold for professional inspections and/or tooling interventions
- Accurate micro movements like “move 1 inch to the right”
- Travel over great distance and use “dead reckoning” to create the travelled path
- Find home even while being out of reach of acoustic positioning systems like Underwater GPS
- Accurate flight path which pairs very well with sonar imagery
Combine the DVL with our Underwater GPS system to get a high performance, professional navigation package!
Specifications
| MECHANICAL | |
|---|---|
| Device diameter | : 66 mm |
| Device height | : 25 mm |
| Device weight (air) | : 250 grams |
| Device weight (submerged) | : 185 grams |
| Depth rating | : 1000 meters |
| Materials | : Stainless steel 316 (housing) : PEEK (transducer caps) |
| Operating temperature | : -5 to 60 °C |
| ELECTRICAL / INTERFACE | |
| Input voltage | : 10-30 V |
| Power consumption | : 0.25 A at 12V |
| Power-on current surge | : 1.25 A at 12V |
| Physical interface | : 8 wires (pwr/serial/Ethernet) : 3 meter cable with interface module |
| Indicator | : Status LED (Power, Lock) |
| Communication | : UART 115200 baud serial 3,3V : Ethernet |
| Protocols | : Water Linked API : PD0 (subset) : PD6 |
| ACOUSTIC / PERFORMANCE | |
| Transducer frequency | : 1 MHz |
| Transducer setup | : 4-beam convex Janus array |
| Transducer beam angle | : 22.5 degrees |
| Ping rate | : 4-12 Hz (adaptive to altitude) |
| Sensor assist | : Integrated AHRS/IMU (gyro/accelerometer/compass) |
| Min altitude | : 5 cm |
| Max altitude | : 50 meters |
| Max velocity | : 2.6 m/s |
| Velocity resolution | : 0.1 mm/s |
| >Long term accuracy | : ±1.01 % (Standard version) : ±0.1 % (Performance version) |
| APPROVALS | |
| CE | : Yes |