





Product Description
The T200 Thruster is a patented underwater thruster designed specifically for marine robotics.
Versus the T100 Thruster, the T200 is better for larger vehicles and especially for human-carrying vehicles. It’s much better suited for use on a kayak, stand-up paddleboard, while scuba-diving, or even on a small fishing boat. They are the same physical size as the T100 Thrusters, but the internal components are larger.
Applications
The T200 was designed for various consumers and limitless applications. Students and Schools can use the T200 for educational projects or compete in competitions such as the AUVSI RoboSub and RoboBoat competitions and the MATE ROV competition. Its capable and affordable hardware make it perfect for Makers and Hobbyists, as well as Professional Users who want a high-quality thruster that performs better than many of the high-end (expensive) alternatives.
Features
The T200 is basically a brushless electric motor, just like you’d find on an RC airplane or a quadcopter drone. The big difference is that this motor is purpose-built for use in the ocean and was designed specifically for use on ROVs, AUVs, and robotic surface vehicles. Of course, you could also use it to propel your stand-up-paddleboard or cruise around while kayaking! Its compact design fits in any project.
The T200 is made of high-strength, UV resistant polycarbonate injection molded plastic. The core of the motor is sealed and protected with an epoxy coating and it uses high-performance plastic bearings in place of steel bearings that rust in saltwater. Everything that isn’t plastic is either aluminum or high-quality stainless steel that doesn’t corrode.
A specially designed propeller and nozzle provide efficient, powerful thrust while active water-cooling keeps the motor cool. Unlike other thrusters, our design doesn’t have any air- or oil-filled cavities – water flows freely through all parts of the motor while it’s running and can handle extreme pressures.
The thruster is easy to use: just connect the three motor wires to any brushless electronic speed controller (ESC) and you can control it with an RC radio or a microcontroller. It’s usable with Arduino, ArduPilot, Raspberry Pi, BeagleBone, and many other embedded platforms.
The T200 comes with clockwise and counter-clockwise propellers to counter torque.
Contents
- 1 x T200 Thruster
- 1 x Clockwise and counterclockwise propeller
Specifications
| Parameter | Value | |
|---|---|---|
| Performance | ||
| Full Throttle FWD/REV Thrust @ Nominal (16 V) | 5.25 / 4.1 kg f | 11.6 / 9.0 lb f |
| Full Throttle FWD/REV Thrust @ Maximum (20 V) | 6.7 / 5.05 kg f | 14.8 / 11.1 lb f |
| Minimum Thrust | 0.02 kg f* | 0.05 lb f* |
| Electrical | ||
| Operating Voltage | 7-20 volts | |
| Full Throttle Current @ Nominal (16 V) | 24 Amps | |
| Full Throttle Current @ Maximum (20 V) | 32 Amps | |
| Full Throttle Power @ Nominal (16 V) | 390 Watts | |
| Full Throttle Power @ Maximum (20 V) | 645 Watts | |
| Physical | ||
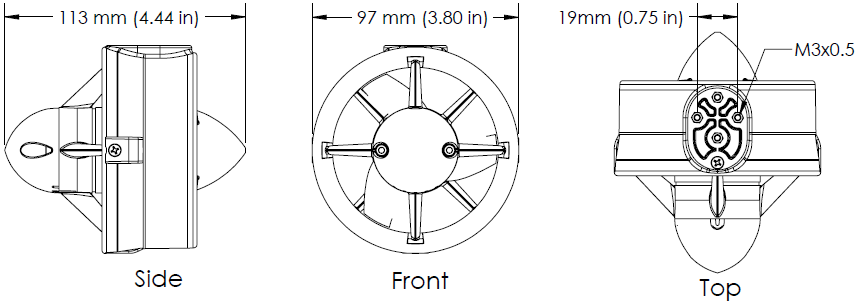
| Length | 113 mm | 4.45 in |
| Diameter | 100 mm | 3.9 in |
| Weight in Air (with 1m cable) | 0.76 lb | 344 g |
| Weight in Water (with 1m cable) | 0.34 lb | 156 g |
| Propeller Diameter | 76 mm | 3.0 in |
| Mounting Hole Threads | M3 x 0.5 | |
| Mounting Hole Spacing | 19 mm | 0.75 in |
| Cable Length (Standard T200) | 1.0 m | 39 in |
| Cable Length (T200 BlueROV2 Spare) | 0.71 m | 28 in |
| Cable Diameter | 6.3 mm | 0.25 in |
*Values limited by ESC used to drive thruster.
Note that nominal operation at 12-16 V is recommended for the best balance of thrust and efficiency, though operation at up to 20 V is allowable. Exceeding 20 V is not within the rating and not recommended, please see here for more information.
For more detailed performance specifications, including thrust, RPM, power, and efficiency at various throttle levels and supply voltages from 10-20 V, please see the performance charts below.
2D Drawings
3D Models
T200-THRUSTER-R1 (.zip)



