











Product Description
The Locator-S1 is a digital hydroacoustic locator device with an internal GPS based time sync module.
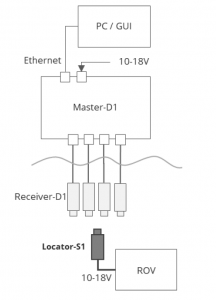
The Locator-S1 does not require tether integration for top-side communication. It only requires external power 10-18V to be provided from the underwater vehicle. Time-sync with the top-side is achieved using its internal GPS. That makes it perfect for integration with ROVs that don’t have an extra twisted pair in their tethers, such as a BlueROV2 with the Fathom Slim tether, or for fiber optic tethers.
As the Locator-S1 does not carry its own depth sensor, the depth needs to be provided from the underwater vehicle (ROV, etc.) to the topside Master-D1 using the software API. Example of how to perform this can be found here.
This integration is already done if using an ArduSub vehicle (like the BlueROV2).
Some Locator-S1 attributes can be configured using an integrated I2C interface. This configuration is optional and not required for normal operation.
Before deployment in water, the Locator-S1 needs to achieve a GPS lock. The integrated status-LED shows the condition of the GPS lock.
It comes standard with a 1-meter cable (with preinstalled cable penetrator) for easy integration with ROVs like the BlueROV2.
Benefits:
- GPS based sync removes all tether requirements enabling very easy integration with any ROV.
- Extremely small size making it perfect for even the smallest underwater vehicles.
- Highly robust operation in areas with reflections (shallow water, around installations, etc.)
Contents
- 1 x Water Linked Locator-S1 w/1-meter cable and penetrator (installed)
- 1 x Penetrator Nut
- 1 x Penetrator O-ring



